
GTJZ1012 მაკრატელი საჰაერო საოპერაციო პლატფორმა





I. პროდუქტის მიმოხილვები და მახასიათებლები
XCMG-ის მიერ შემუშავებული ახალი საჰაერო სამუშაო პლატფორმა აქვს სამუშაო სიმაღლე 12 მ, ავტომობილის სიგანე 1.17 მ, ნომინალური დატვირთვა 320 კგ, მაქს.პლატფორმის სიგრძე 3.2 მ და მაქს.შეფასების უნარი 25%.ეს მანქანა გამოირჩევა კომპაქტური სტრუქტურით, მოწინავე წარმადობით, დასრულებული უსაფრთხოების მოწყობილობებით, სპეციალურად მშენებლობისთვის.გარდა ამისა.იგი თავისუფალია ყოველგვარი დაბინძურებისაგან, მუდმივი აწევით/ჩაწევით, მარტივი კონტროლით და შენარჩუნებით.ამიტომ, ამ ტიპის პლატფორმები ფართოდ გამოიყენება საწყობებში, ქარხნებში, აეროპორტებსა და მატარებლის სადგურებზე, განსაკუთრებით ვიწრო სამუშაო ადგილებზე.
[უპირატესობები და მახასიათებლები]
●ეფექტური და ენერგიის დაზოგვის ელექტროძრავის სისტემა აღჭურვილია ნულოვანი გამონაბოლქვით და დაბალი ხმაურით, უკვალოდ საბურავებთან ერთად, რაც ამ მანქანას საშუალებას აძლევს ადვილად იმუშაოს დახურულ გარემოში, როგორიცაა ოფისის შენობა, საავადმყოფოები და სკოლები და ამცირებს გარემოზე ზემოქმედებას.
●აქტიური დამცავი მექანიზმი, როგორიცაა ხვრელების დამცავი მექანიზმი და უსაფრთხოების კონტროლის თვითგანვითარებული სისტემა, ხასიათდება ჰუმანიზებული დიზაინით და მდიდარი ოფციებით, რაც აკმაყოფილებს დამკვეთის საჭიროებას უსაფრთხოების, საიმედოობისა და ინტელექტის შესახებ.
●სამუშაო პლატფორმას შეუძლია გაფართოვდეს, გაზარდოს სამუშაო სივრცე, დასაკეცი ღობესთან ერთად ტრანსპორტირებას აადვილებს.
●„ნულოვანი შემობრუნების რადიუსი“ უნიკალურია და საშუალებას აძლევს მანქანას კუთხეში მოხვედრა ვიწრო ოთახში.
●მაქს.ტვირთამწეობა 320 კგ, წამყვანი ინდუსტრიაა.
●მაქსიმალური მგზავრობის სიჩქარე 3.2კმ/სთ და 25% კლასიფიკაცია აადვილებს მართვას.
I. პროდუქტის მიმოხილვები და მახასიათებლები
XCMG მაკრატლის საჰაერო სამუშაო პლატფორმა GTJZ1012 აქვს მრავალი უპირატესობა, როგორც ქვემოთ:
1. მოსახერხებელი ტრანსპორტი და სტაბილური ოპერაცია
ტელესკოპური ქვეპლატფორმა აღწევს დიდ სამუშაო სივრცეს და მუშაობს დასაკეცი პლატფორმით, რათა გააცნობიეროს უფრო ადვილი ტრანსპორტირება და გადაადგილება.ინდუსტრიის წამყვანი ავტომატური ორმოების დაცვის სისტემა და გაფართოებული ბორბლების სარბენი დიზაინი საშუალებას გაძლევთ იმუშაოთ უხეში ადგილზეც კი.
2. გარემოს მინუსები Truction და მოსახერხებელი მომსახურება
სუფთა ელექტროძრავა, ნულოვანი გამოშვება, დაბალი ხმაური და მეტი გარემოს კონსტრუქცია.მთლიანი სვინგის ტიპის უჯრა მოსახერხებელია მომსახურებისა და მოვლისთვის.
3. ზოგადი და მოდულური დიზაინი
აპარატის მოდულური დიზაინი უზრუნველყოფს ნაწილების უნივერსალურობის გარანტიას, აადვილებს მომხმარებელთა შეკეთებას და შენარჩუნებას და აღწევს უფრო კონკურენტუნარიან ღირებულებას.
II.ძირითადი ნაწილების გაცნობა
1. შასი
ძირითადი კონფიგურაცია: ორბორბლიანი საჭე, 4×2 წამყვანი, ავტომატური სამუხრუჭე სისტემა, ხვრელებისგან დაცვის ავტომატური სისტემა, მყარი რეზინის საბურავები მარკირების გარეშე, მუხრუჭის ხელით გაშვება
(1) მაქსიმალური მართვის სიჩქარეა 3.2 კმ/სთ.
(2) მაქსიმალური გრადიენტი არის 25%.
(3) სტანდარტული ხვრელი შასის უკანა ჩანგლების გადასატანად
(3) ორმოს დაცვის ავტომატური სისტემა - უზრუნველყოფს პლატფორმის აწევის უსაფრთხოებას.
(4) უგზაო მყარი რეზინის საბურავები - მაღალი დატვირთვა, სტაბილური მუშაობა და ეკოლოგიურად სუფთა
(5) 4 × 2 დისკზე, გარდამტეხი ბორბლები ასევე არის წამყვანი ბორბლები, სამი სიჩქარით მოძრაობა, რაც საშუალებას იძლევა სრული მგზავრობა.
(6) ავტომატური სამუხრუჭე სისტემა - მანქანა ავტომატურად ამუხრუჭებს მოძრაობას ან ფერდობზე გაჩერებისას;გარდა ამისა, არის დამატებითი ხელის მუხრუჭი საგანგებო სიტუაციისთვის.
2. ბუმი
(1) ორმაგი ლუფის ცილინდრები + ათვლის ბუმის ხუთი კომპლექტი.
(2) მაღალი სიმტკიცის ფოლადი - ბუმი მსუბუქი წონაა და უსაფრთხოა.
(3) შესატყვისი ძალა და სიმტკიცე - უზრუნველყოს საიმედო ბუმი.
(4) ინსპექტირების ჩარჩო - შეინარჩუნეთ შემოწმების უსაფრთხოება
3. სამუშაო პლატფორმა
(1) დატვირთვა 320 კგ-მდე ძირითადი პლატფორმისთვის და 115 კგ მეორადი პლატფორმისთვის;
(2) სამუშაო პლატფორმის სიგრძე × სიგანე: 2.27 მ × 1.12 მ;
(3) ქვეპლატფორმა შეიძლება გაგრძელდეს ერთი გზით 0.9 მ-ით;
(4) პლატფორმის კარიბჭე თვითჩაკეტილია
(5) პლატფორმის დამცავი დასაკეცი
4. ჰიდრავლიკური სისტემა
(1) ჰიდრავლიკური ელემენტები - ჰიდრავლიკური ტუმბო, მთავარი სარქველი, ჰიდრავლიკური ძრავა და მუხრუჭები არის ადგილობრივი (ან საერთაშორისო) ცნობილი მწარმოებლებისგან.
(2) ჰიდრავლიკური სისტემა ამოძრავებს ძრავზე მომუშავე გადაცემათა ტუმბოს, რათა აწიოს ან დაწიოს პლატფორმა და გაატაროს და მართოს პლატფორმა.
(3) ამწე ცილინდრი აღჭურვილია გადაუდებელი დაწევის სარქველით - დარწმუნდებით, რომ პლატფორმა სტაბილური სიჩქარით შეიძლება დაიწიოს შებრუნებამდე, თუნდაც უბედური შემთხვევის ან ელექტროენერგიის გათიშვის დროს.
(4) ამწევი ცილინდრი აღჭურვილია ჰიდრავლიკური საკეტით, რათა უზრუნველყოს სამუშაო პლატფორმის საიმედო შენარჩუნების სიმაღლე ჰიდრავლიკური შლანგის გატეხვის შემდეგ.
5. ელექტრო სისტემა
(1) ელექტრო სისტემა იყენებს CAN ავტობუსის მართვის ტექნოლოგიას.შასი აღჭურვილია კონტროლერით, პლატფორმა აღჭურვილია საკონტროლო სახელურით და შასისსა და პლატფორმის კონტროლერს შორის კომუნიკაცია ხორციელდება CAN ავტობუსით, რათა აკონტროლოს მანქანის მოქმედება.
(2) პროპორციული კონტროლის ტექნოლოგიები თითოეულ მოქმედებას სტაბილურს ხდის.
(3) ელექტრული სისტემა აკონტროლებს ყველა მოქმედებას, მათ შორის მარცხნივ/მარჯვნივ საჭეს, წინ/უკან მგზავრობას, მაღალ და დაბალ სიჩქარეს შორის გადასვლას და სამუშაო პლატფორმის აწევას/ჩაწევას.
(4) უსაფრთხოებისა და გაფრთხილების მრავალი მეთოდი: დახრილი დამცავი;სახელურების ურთიერთდაკეტვა;ხვრელის ავტომატური დაცვა;ავტომატური დაცვა დაბალი სიჩქარით მაღალ სიმაღლეზე;დაცემის პაუზა სამი წამით;მძიმე დატვირთული გამაფრთხილებელი სისტემა (სურვილისამებრ);დამუხტვის დამცავი სისტემა;გადაუდებელი ღილაკი;მოქმედების ზუმერი, სიხშირის ციმციმი, საყვირი, ტაიმერი და ხარვეზების დიაგნოსტიკის სისტემა.
III.ძირითადი ელემენტების კონფიგურაცია
| S/N | ძირითადი კომპონენტი | რაოდენობა | ბრენდი | შენიშვნა |
| 1 | კონტროლერი | 1 | ჰირშმანი/ჩრდილოეთის ველი | |
| 2 | მთავარი ტუმბო | 1 | სანტი/ბუჩერი | |
| 3 | ჰიდრავლიკური ძრავა | 2 | დანფოსი | |
| 4 | ჰიდრავლიკური მუხრუჭი | 2 | დანფოსი | |
| 5 | კვების ბლოკი | 1 | ბუჩერი/GERI | |
| 6 | დრეკადი ცილინდრი | 1 | XCMG ჰიდრავლიკური განყოფილება / Dacheng / Shengbang / Diaojiang | |
| 7 | საჭის ცილინდრი | 1 | ||
| 8 | ბატარეა | 4 | ტროიან/ლეოხი | |
| 9 | დამტენი | 1 | GPD | |
| 10 | Ლიმიტი შეცვლა | 2 | Honeywell/CNTD | |
| 11 | ტესტირების შეცვლა | 2 | Honeywell/CNTD | |
| 12 | ძრავის წამყვანი | 1 | კერტისი | |
| 13 | საბურავი | 4 | ექსმაილ/ტოპაუერი | |
| 14 | კუთხის სენსორი | 1 | ჰანიველი | სურვილისამებრ |
| 15 | Წნევის სენსორი | 1 | დანფოსი | სურვილისამებრ |
IV.ძირითადი ტექნიკური პარამეტრების ცხრილი
| ელემენტი | ერთეული | Პარამეტრი | დასაშვები ტოლერანტობა | |
| აპარატის ზომა | სიგრძე (კიბის გარეშე) | mm | 2485 (2285) | ±0,5% |
| სიგანე | mm | 1170 წ | ||
| სიმაღლე (პლატფორმა დაკეცილი) | mm | 2472 (1908) | ||
| ბორბლიანი ბაზა | mm | 1876 წ | ±0,5% | |
| ბორბლის ბილიკი | mm | 1043 წ | ±0,5% | |
| მიწის მინიმალური კლირენსი (ორმოს დამცავი აღმავალი/დაღმავალი) | mm | 100/20 | ± 5 % | |
| სამუშაო პლატფორმის ზომა | სიგრძე | mm | 2276 | ±0,5% |
| სიგანე | mm | 1120 წ | ||
| სიმაღლე | mm | 1254 წ | ||
| დამხმარე პლატფორმის გაფართოების სიგრძე | mm | 900 | ||
| მანქანის ცენტრალური პოზიცია | ჰორიზონტალური მანძილი წინა ლილვამდე | mm | 950 | ±0,5% |
| ცენტრის სიმაღლე | mm | 663 | ||
| დანადგარის მთლიანი მასა | kg | 2940 წ | ± 3 % | |
| მაქს.პლატფორმის სიმაღლე | m | 10 | ±1% | |
| მინ.პლატფორმის სიმაღლე | m | 1.34 | ±1% | |
| მაქსიმალური სამუშაო სიმაღლე | m | 12 | ±1% | |
| შემობრუნების მინიმალური რადიუსი (შიდა ბორბალი/გარე ბორბალი) | m | 0/2.3 | ±1% | |
| სამუშაო პლატფორმის რეიტინგული დატვირთვა | kg | 320 | - | |
| სამუშაო დატვირთვის შემდეგ პლატფორმა გაფართოვდა | kg | 115 | - | |
| სამუშაო პლატფორმის აწევის დრო | s | 50-75 წწ | - | |
| სამუშაო პლატფორმის დროის შემცირება | s | 43-65 | - | |
| მაქს.სირბილის სიჩქარე დაბალ პოზიციაზე. | კმ/სთ | ≥3.2 | - | |
| მაქს.მოგზაურობის სიჩქარე დიდ სიმაღლეზე | კმ/სთ | ≥0.8 | - | |
| მაქსიმალური შეფასება | % | 25 | - | |
| დახრის გამაფრთხილებელი კუთხე (გვერდით/წინ და უკან) | ° | 1.5/3 | ||
| ამწევი/გამშვები ძრავა | მოდელი | - | - | - |
| რეიტინგული სიმძლავრე | kW | 3.3 | - | |
| მწარმოებელი | - | - | - | |
| ბატარეა | მოდელი | - | T125/3-EV-225 | - |
| Ვოლტაჟი | v | 24 | - | |
| ტევადობა | Ah | 240 | - | |
| მწარმოებელი | - | ტროიან/ლეოხი | - | |
| საბურავების მოდელები | - | უკვალოდ და მყარი /381×127 | - | |
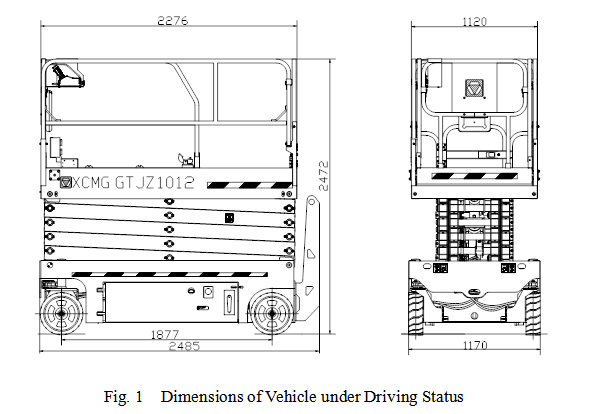
V. სატრანსპორტო საშუალების განზომილებიანი დიაგრამა მოძრავ მდგომარეობაში
დანართი: სურვილისამებრ კონფიგურაციები
(1) დატვირთვის გამაფრთხილებელი სისტემა
(2) პლატფორმის სამუშაო ნათურა
(3) დაკავშირებულია სამუშაო პლატფორმის საჰაერო მილთან
(4) დაკავშირებულია სამუშაო პლატფორმის AC დენის წყაროსთან



