GTBZ14JD ელექტრული ამწე მკლავის საჰაერო საოპერაციო პლატფორმა





I. პროდუქტის მიმოხილვები და მახასიათებლები
ელექტრული ამწე საჰაერო სამუშაო პლატფორმები შემუშავებულია XCMG-ის მიერ, კომპაქტური კონსტრუქციები და მანქანის კორპუსი 1,75 მ სიგანეზე.ინტელექტუალური და სრულყოფილი კონტროლის სისტემას აქვს ჰუმანიზებული განლაგება, ტექნიკური სამუშაოების გარეშე დიზაინი და მარტივი გამოყენება და შენარჩუნება, რაც უზრუნველყოფს მრავალ ვარიანტს და ყოვლისმომცველ უსაფრთხოებას.
[უპირატესობები და მახასიათებლები]
●Σ ფორმის ბუმის კომბინატი და ნულოვანი დრიფტის დიზაინი მას უფრო პროდუქტიულს ხდის.
● 3.15მ შემობრუნების რადიუსი მანქანას საშუალებას აძლევს იმუშაოს ვიწრო სივრცეში.
●48V და 420Ah დიდი ტევადობის ბატარეა ახანგრძლივებს კრუიზირების შესაძლებლობას.
●მოწინავე AC ძრავის მუშაობის ტექნოლოგიები;საჭის დიფერენციალური მართვის ტექნოლოგიები;ძლიერი და სტაბილური მოქმედებები;შეფასების უნარი 30% -მდე
●DC ტუმბოსა და პროპორციული მართვის ტექნოლოგიები ენერგიის დაზოგვის და ეფექტურია, რაც სამუშაოს უფრო სტაბილურს და უსაფრთხოს ხდის.
●ეკოლოგიურად სუფთა, ნულოვანი გამონაბოლქვი, დაბალი ხმაური, უკვალოდ მგზავრობა, შესაფერისი შიდა მშენებლობისთვის.
II.ძირითადი ნაწილების გაცნობა
1. შასის ნაწილი
ძირითადი კონფიგურაციები;2WD, ორბორბლიანი საჭე, მყარი საბურავები.
(1) მართვის მაქსიმალური სიჩქარე 5.2კმ/სთ.
(2) მაქსიმალური შეფასების უნარი 30%.
(3) გამოყენებულია ჩაშენებული სამგზავრო რედუქტორი, რომელიც აერთიანებს ძრავას და რედუქტორს და გათვალისწინებულია ორი მოძრაობის სიჩქარე (მაღალი და დაბალი სიჩქარე), რათა დააკმაყოფილოს მანქანის მართვის მოთხოვნები სხვადასხვა გარემოში.სამგზავრო მექანიზმი აღჭურვილია თვითმუხრუჭების ფუნქციაზე ფერდობებზე მგზავრობისას და აღჭურვილია გადაბმული მოწყობილობით, გაუმართაობის შემთხვევაში ბუქსირების გასაადვილებლად.
(4) ამწე-სლაიდერი მექანიზმი შემობრუნებისთვის უფრო მცირე მობრუნების რადიუსის რეალიზებისთვის;
2. ბუმის ნაწილი
(1) დასაკეცი მკლავი + ტელესკოპური მკლავი + ამწე
(2) ბუმის მასალა - ბუმი შედუღებულია მაღალი სიმტკიცის ფოლადისგან, რათა უზრუნველყოს მსუბუქი და მაღალი უსაფრთხოება.
(3) დასაკეცი მკლავი შედგება პარალელოგრამების სტრუქტურების ორ კომპლექტისგან, რომელთა შორისაა კავშირი და შეიძლება ერთდროულად იმოძრაოს ლუფის ცილინდრის დახმარებით, რაც სამუშაოს უფრო ეფექტურს ხდის.
(4) ტელესკოპური მკლავების ორი განყოფილება ერთცილინდრიანი ტელესკოპური ტიპის;ამწე მკლავები, რომლებიც პარალელოგრამისაა
3. შემობრუნების ნაწილი
(1) 355° უწყვეტი შემობრუნება და ორი სამონტაჟო ხვრელი საკეტის ქინძისთავების გადასატანად;
(2) მბრუნავი მაგიდა შედგება ერთი ფირფიტისგან გამაგრებითი ნეკნით;საკინძები მაღლა დგას და საპირწონე მოთავსებულია მბრუნავი მაგიდის უკანა მხარეს;
4. პლატფორმის ნაწილი
(1) 1.4მ×0.7მ დიდი სამუშაო პლატფორმა.
(2) 160° მბრუნავი პლატფორმა.
(3) 227 კგ-მდე ტარების მოცულობა.
(4) ელექტროჰიდრავლიკური პროპორციული ავტომატური ნიველირების სისტემა.
5. ჰიდრავლიკური სისტემა
(1) ჰიდრავლიკური ნაწილები - ძირითადი ნაწილები, მათ შორის ჰიდრავლიკური ტუმბო და ძირითადი სარქველი, იღებს საერთაშორისო ცნობილ ბრენდის პროდუქტებს.
(2) ჰიდრავლიკური სისტემა მართავს ბატარეის ტუმბოს;გადაცემათა ტუმბო პირდაპირ ამოძრავებს ძრავით.
(3) ზედნაშენის ჰიდრავლიკური სისტემა არის მუდმივი ნაკადის გადაცემათა ტუმბოს სისტემა: ელექტრო-ჰიდრავლიკური პროპორციული კონტროლის ტექნოლოგიების საფუძველზე, მანქანას შეუძლია შეასრულოს ზედნაშენის დაძვრა, ბუმის გაფუჭება, ბუმის გამობრუნება/გახანგრძლივება, სამუშაოს რხევა. პლატფორმა;ზედნაშენის მთავარი სარქველი ელექტრო-ჰიდრავლიკური პროპორციული სარქველია.
(4) დაყენებული გადაუდებელი ელექტრული ბლოკი - მას შეუძლია უზრუნველყოს, რომ ბუმი შეიძლება დაიბრუნოს მართვის სტატუსზე ძრავის ან ზეთის ტუმბოს გაუმართაობის შემთხვევაში.
6. ელექტროსისტემა
(1) PLC კონტროლის ტექნოლოგია - თითო კონტროლერი არის გათვალისწინებული გრუნტის და პლატფორმისთვის.შასის გრუნტისთვის და პლატფორმისთვის დამონტაჟებულია საკონტროლო ყუთი, რათა მართოს შასის, გრუნტი, ბუმი და პლატფორმა.
(2) ძირითადი საკონტროლო ელემენტები - შასის საჭე და სამგზავრო კონტროლი;მბრუნავი მაგიდის ტრიალი;ბუმი ტელესკოპური;ლუფის კონტროლი;პლატფორმის გაფუჭება
(3) უსაფრთხოების დაცვის მრავალი მეთოდი - ძრავის მოძრაობის მონიტორინგი;ძრავის გადატვირთვისგან დაცვა;მანქანის დახრის გაფრთხილება;გადატვირთვის გაფრთხილება;მაღალსიჩქარიანი სირბილი შეზღუდულია;გადაუდებელი ვარდნა;
III.GTBZ14JD ძირითადი ნაწილების კონფიგურაცია
| S/N | სახელი | რაოდენობა | შენიშვნა |
| ბატარეა | 8 | ტროას | |
| დამტენი | 1 | დონგუან ლონგშენგი | |
| ძრავის წამყვანი | 2 | კურტისი | |
| მოგზაურობის შემცირება | 2 | Omni | |
| მომუშავე AC ძრავა | 2 | KDS | |
| ძირითადი ბატარეის ტუმბო | 1 | ბუჩერი | |
| დამხმარე ბატარეის ტუმბო | 1 | ბუჩერი | |
| მთავარი ტუმბო | 1 | სანტ | |
| სვინგის ცილინდრი | 1 | აშშ HELAC | |
| ნიველირებადი ცილინდრი | 2 | Chengdu Chenggang Hydraulic Equipment Co., Ltd./XCMG Hydraulic Parts Co., Ltd. | |
| No1 მკლავის ლუფის ცილინდრი | 2 | ||
| No2 მკლავის ლუფინგის ცილინდრი | 1 | ||
| ამწე მკლავის ცილინდრი | 1 | ||
| ტელესკოპური ცილინდრი | 1 | ||
| საჭის ცილინდრი | 1 | ||
| ბალანსის სარქველი | 5 | Sant/EATON | |
| კონტროლერი | 2 | ჰირშმანი | |
| ორმაგი ლილვის დახრილობის სენსორი | 1 | პარკერი | |
| ჩვენება | 1 | Xuzhou Hirschmann Electronic Co., Ltd. | |
| ჯოისტიკი | 2 | დანფოსი | |
| Ფეხის შეცვლა | 1 | მზეები | |
| რხევა და მანქანა | 1 | ჰუაფანგი | |
| სვინგის ძრავა | 1 | თეთრი | |
| საბურავები | 4 | ლაიჟოუ იშიმაი |
IV.GTBZ14JD ძირითადი ტექნიკური პარამეტრების ცხრილი
| ელემენტი | Პარამეტრი |
| გაშვებული მდგომარეობის პარამეტრები | |
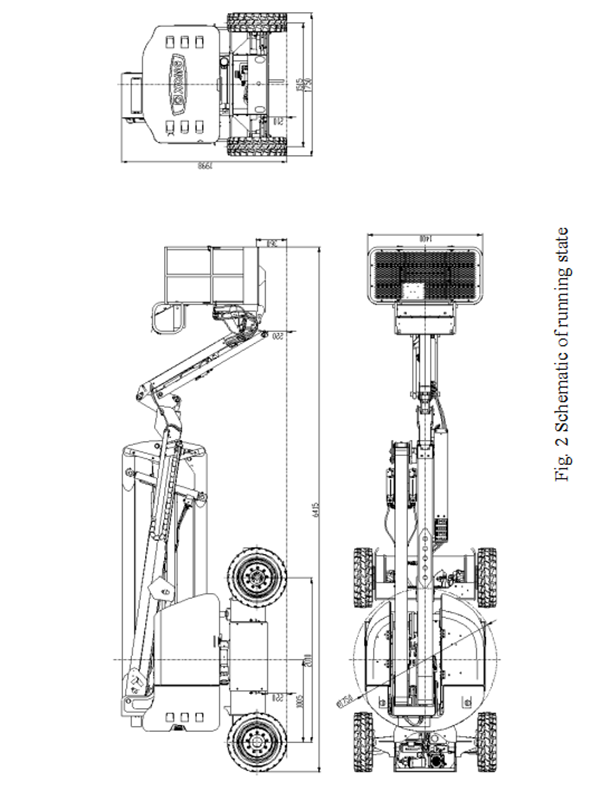
| საერთო ზომები (L × W × H) | 6,42×1,75×2 მ |
| სამუშაო პლატფორმის საერთო ზომები | 1,4×0,7×1,15 მ |
| Მაქსიმალური სიჩქარე | 5.2 კმ/სთ |
| მაქსიმალური შეფასება | ≥30% |
| მინ.გარე შემობრუნების რადიუსი | ≤3,15 მ |
| მიწის კლირენსი/მ (ცენტრი) | 0,21 მ |
| ბორბლიანი ბაზა | 2 მ |
| საერთო მასა | 6500 კგ |
| ძირითადი ოპერაციის შესრულების პარამეტრები | |
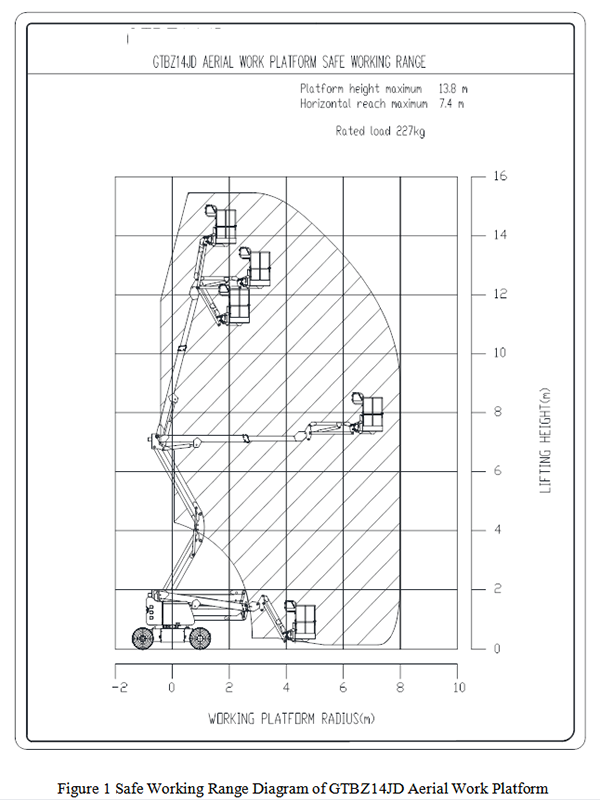
| შეფასებული სამუშაო სიმაღლე | 15,5 მ |
| პლატფორმის მაქსიმალური სიმაღლე | 13,8 მ |
| მაქს.სამუშაო დიაპაზონი | 8 მ |
| მაქსიმალური წმინდა დაფარვის სიმაღლე | 7,03 მ |
| No1 მკლავის ლუფინგის ფარგლები | 0°~60° |
| No2 მკლავის ლუფინგის ფარგლები | -8°~75° |
| ამწე მკლავის ლუფის ფარგლები | -60°~80° |
| პლატფორმის რხევის ფარგლები | 180° |
| დახრის კუთხე | 355° |
| შემობრუნების რადიუსი | 0,875 მ |
| მაქსიმალური დატვირთვა | 227 კგ |
| მაქსიმალური უკანა გადახვევა | 0 მ |
| Საკონტროლო სისტემა | 12V DC პროპორციული კონტროლი |
| საბურავი | 250-15 მყარი საბურავი, სურვილისამებრ 240/55 D17.5 |
| დენის პარამეტრები | |
| Კვების წყარო | 420 Ah/48 V DC |
| კვების ბლოკი | 4 კვტ/48 ვ DC |
| დამხმარე დენის ერთეული | 2.2 კვტ/24 ვ DC |
| მოძრავი ძრავა | 3.3 კვტ/32 ვ ცვლადი |
V. მანქანის უსაფრთხო სამუშაო დიაპაზონის დიაგრამა
დანართი: სურვილისამებრ კონფიგურაციები
6.1 ეკოლოგიურად სუფთა მყარი საბურავი (უკვალოდ)
6.2 პლატფორმის ელექტრომომარაგება
ჰიდრავლიკური გენერატორი ან გარე კვების წყარო მიბმულია ამ პლატფორმაზე გამოსაყენებლად.
დენის მავთულის სპეციფიკაცია: 4×4 მმ2
ნომინალური დენი: 35A
6.3 პლატფორმის საჰაერო მილი
გარე ჰაერის მიწოდება მიეწოდება ამ პლატფორმას გამოსაყენებლად.
საჰაერო მილის დიამეტრი: 8 მმ
6.4 პლატფორმის ზემოქმედების საწინააღმდეგო სამაგრი
დასაკეცი დარტყმის საწინააღმდეგო მოწყობილობამ უნდა დაიცვას ოპერატორი ზემოაღნიშნული ნივთის ზემოქმედებისგან პლატფორმის აწევის დროს და ასევე შეიძლება იყოს დასაკეცი, არ დაიკავოს სამუშაო ადგილი.